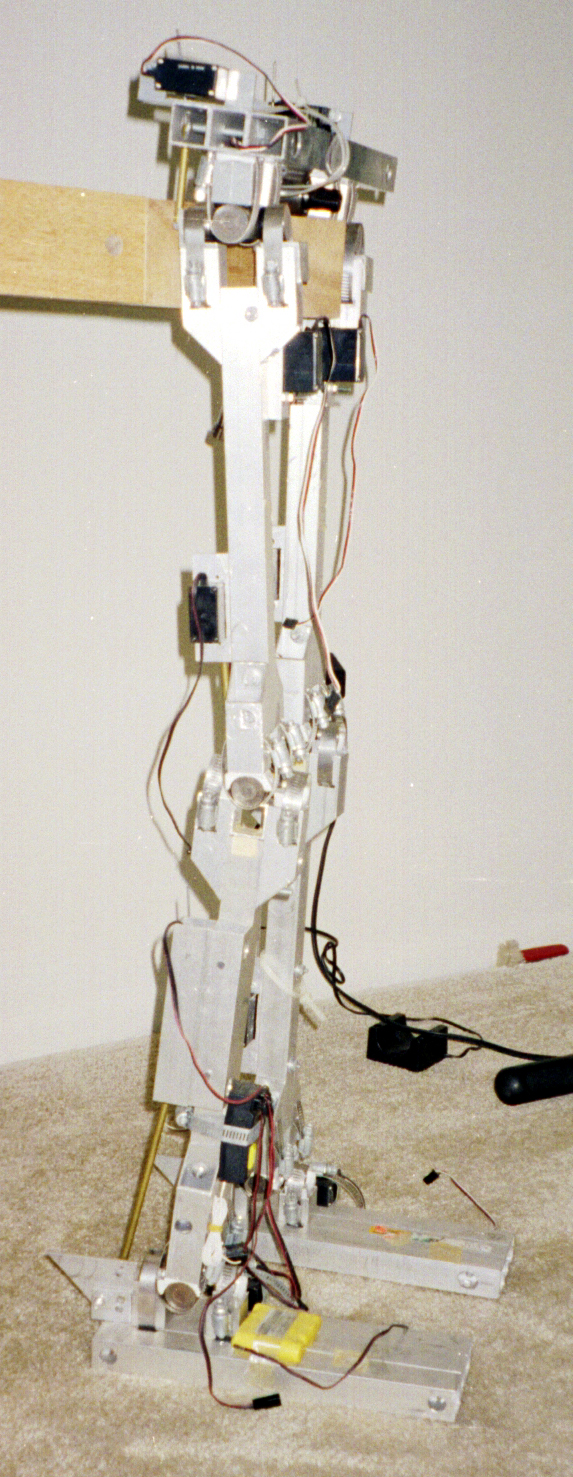
Alf Makimbo. Alf was my first full foot-to-hip prototype.
Note the heavy-duty construction
of the ankle, knee and hip joints. These are automobile u-joints.
Alf had the uncanny ability
to simply stand upright (in the Makimbo fashion) even when all the
power was turned off
due to the servos natural resistance to motion. The connector
shafts are obviously weak and
bend quite readily. The best thing I like about Alf's design
is the lower foot servo is mounted
below the u-joint's center of rotation, and thus neither foot servo
interferes with the other
over all angles of rotation: something which can't be said of
Achilles' design. The keen
observer will note that the hip is basically an inverted foot
with two ankles.

Copyright © 1999 Patrick M. Rael
All rights reserved