
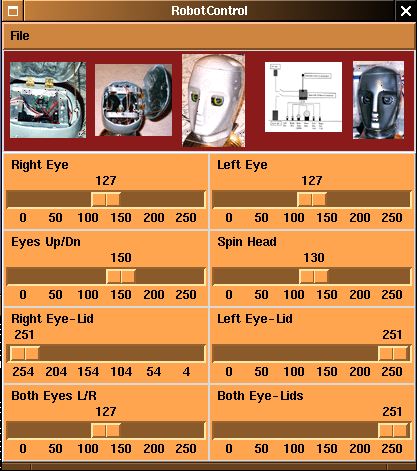
RobotControl application to drive R.Max. Each servo motor (6 in
all)
is connected to a slider bar. Each slider bar has a minimum and
maximum. The servo moves from minimum to maximum with the
slider bar. This version of RobotControl is written in Perl/Tk.
The
bottom two sliders control two servos at a time.