M1: An Architecture for a Living Android's Mind
by Patrick M. Rael (pmrael@aol.com)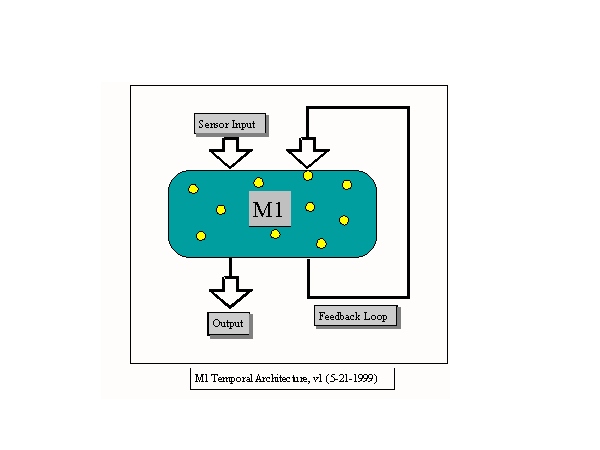
M1: An Architecture for a Living Android's Mind
by Patrick M. Rael (pmrael@aol.com)
Abstract: The goal of the M1-Project is to create a physical
and virtual Android Robot which can be programmed to perform the creative
behaviors somewhat similar to those in people. The system will have
a physical presence. The system must be able to adapt to new situations.
It must be able to re-program itself. The Android's Mind must be
designed such that given enough time and education it can become an expert
in fields of study and get advanced degrees. A balance must be struck
between too little initial programming, resulting in decades or centuries
of learning, and too much initial programming resulting in too much change
required for new learning to occur.
The M1 Android Robot Mind Architecture as outlined below is a work in progress. Ten areas have been identified as being significant or helpful in order to program a sentient robot. These ten components will form the foundation of the android's "Mind". It is critical to note that the android's mind is no mere I/O function. The M1 Mind will not be a simplistic "if A then 1, elseif B then 2, ...". Nor will M1 be a simplistic word pattern-matcher. Rather, M1 will consist of a physical presence in a defined dimensional universe and will be heavily oriented toward learning about itself, others, the world and the universe.
Preface
Introduction
1. Spatial-Extents
2. Species-Recognition
3. Survival
4. Temporal-Extents
5. Analogy-Processor
6. Mind-Casts
7. Brain Store
8. Sensory I/O
9. Focus
10. Language
M2
M3
The design of the Temporal Architecture is very simplistic at this point. It will be further refined and detailed in the coming weeks and months. However, there is enough detail even at this early stage to see that the M1 Architecture is no mere I/O function. The Feedback Loop provides a potentially continuous processing mechanism regardless of Sensor Input and Output. ie; The M1 Mind can be functioning and active regardless of any current input and output.
1. Mind-Casts
1. Scientific
2. Religious
3. Warrior
4. Political
5. Business
6. Artistic
7. Bios
8. Herd
9. Self
10. Partner
These Mind-Casts represent a high-level overview
of the categories of behaviour and information processing. I think
it's critical to identify and differentiate between these categories of
behavior because focusing on only one should prove to be a major complexity
reduction when it comes to implementing these. I propose that the
Scientific Mind-Cast may be the easiest to implement because there is less
randomess to code than in the other mind-casts. The Scientific mind
is the epitomy of objectivity, like a finely tuned machine.
Sometimes when trying to solve a complex system,
it helps to have a focused, short-term goal. Otherwise, the complexity
may be overwhelming. A good short-term goal which encompasses several
of the components of the M1 Mind Architecture is the following:
As a first milestone of the M1 Mind Architecture, I'd like to be
able to place the computerized Android Robot head in any room
and let the robot identify 8 things with it's sensors:While the Robot is doing this, it will be building a fully 3-D
- Ceiling
- Floor
- Walls
- Doors/doorways
- Windows
- Tables
- Chairs
- People
representation of what it perceives around it. This will be called
the Robot's Minds-Eye. This 3-D representation
is to be visible on the computer screen so that anyone can see
what the Robot perceives.For example, if the Robot thinks a table is in the room, then it will
create a 3-D table object in it's Mind's Eye. If the Robot thinks a
person is in the room, it will create an Avatar to represent that
person. Note that the Robot can be wrong. It may think a person
is in the room when only lifesize picture of a person is present.The Robot's Mind's Eye operates under a system of Perceptual
Assumptions. It is not necessary for the Robot' Mind's Eye to be
100% accurate; only that the Robot act on it's perceived reality.
The Robot may ask for help in identifying things and people.
Discussion:
I don't think it's absolutely
necessary for there to be a physical component for life.
I can imagine non-physical
forces such as gravity, magnetism, etc, which I wouldn't
want to rule out as being
potential domains of life forms. However, at the moment
it will be exceedingly difficult
to build such a non-physical based life form with current
technology. Therefore,
a physical-based life form will be attempted.
Discussion:
Most of the life forms we can currently study have the ability to recognize
others
of their own species. This enables reproduction. While the
android robot we're
building is not going to have it's own reproductive capabilities, it will
none-the-less be
useful for it to recognize it's own species, and it's creator species.
Discussion:
The Android robot will need an energy source. It's not going to be
much use if
it has a constant umbilical cord connected into the wall. It
will be sufficient for
the robot to periodically replenish it's power sources. Three times
daily is acceptable.
We can call that a Power-Breakfast, Power-Lunch, and Power-Dinner.
Snacks
are ok too.
The
robot isn't going to be of much practical value if it readily disassembles
itself.
An aversion (fear-of) to dismemberment will have to be encoded.
Discussion:
Many early prototypes of intelligence were in the form of programs which
pretended to carry on a discussion with people. The person types
input into the
program and the discussion ensues. Most of these programs suffer
from the
Black-Box-Syndrome: the thinking is that one MUST model intelligence as
if it
could live in a black box. A very brilliant person invented this
black-box system.
Unfortunately, this person didn't himself provide an implementation using
this system.
Many
of these programs lack the Temporal Extents component: they will wait
indefinetly for input. The ones which won't wait indefinitely usually
have a simple
chronometer-based timeout. I don't think M1 should have a simple
chronometer
based temporal system. I think M1's Temporal Extents system is at
least 1 level
of complexity more complex than a simple chronometer.
Discussion:
Analogies are useful for understanding something new in terms of it's relation
to
something already known.
1. Mind-Cast Categories with a
sampling of some properties.
1. Science* - Facts, proof, hypothesis, theory, objectivity, rigor, mathematical,
logic, deduction,
induction, axioms, education, cause-effect.
2. Religion - Belief, faith, salvation, mysticism, happiness, perception,
appearance, good/evil,
super-coordinator, ways to live, subjective codes of conduct, multi/after-lives,
balance with
nature, angels, spirits, ghosts, super-natural, purposeful, creationism,
fear of eternal fire/plasma
and/or punishment.
3. Warrior - Military, battle, superiority, conquer, fight, survival, defend,
intimidation, force,
fight or flight.
4. Political - Authority, popularity, control of others, appearance, polls,
election, coup,
public service/control.
5. Business - Profit, wealth, material, money, greed, transactions, marketing,
commerce, labor.
6. Art - Subjectivity, appearance, creativity, originality, imprecision,
entertainment, authoring.
7. Bios - Body, health, sports, pleasure, pain, reproduction, appearance
of, organic, gut,
maintenance.
8. Herd - Mob, hive, collective, self-less, one-of-many, strength-in-numbers,
the flow, what
others think and are doing is of supreme importance.
9. Self - I, me, yo, self-ish, the center of the universe is ME.
10. Partner - Significant other, extended self, family.
2. Mind-Cast System
Analysis Methodologies (SAM) - Certain MCs are associated with
methodologies in analyzing systems. For example, in Science the scientific-method
prevails
in analyzing systems. Certain SAMs below are generic and may apply
to all MCs. The
information below is preliminary and subject to revision.
1. Give Things A Name (GTAN) - Give things a name or find the name of things.
2. Principle of Variables (PV) - Find the variable (that which can
vary) properties in
things. Consider the system's state when the values of the variables
are changed.
3. Hierarchies
1. Generalize-Categorize (GC) - The more general category.
2. Specialize-Instantiate (SI) - The more specific example.
4. Domain-Analysis (DA) - A system for analyzing the legal and illegal
domains
of systems.
5. Idealism (Id) - A system for decoupling what one wants or what should
happen
from how to achieve it or how it will come about.
6. Ways of Choosing (WC) - A system for making choices.
1. Does the choice have to be correct? Does a wrong choice exist?
2. Is this a Defining choice? Is any choice okay?
3. Is there a set or range(es) to choose from?
7. Cause and Effect modeling.
8. Logic
9. Scientific Method
10. more ...
Discussion:
In any Android Robotic project, eventually the point is reached where behavioural
modeling is addressed. Unless all behaviours are fair game [not necessarily
a bad
choice] then the domain of human behaviours is usually identified next.
Then a
categorization of the large number of behaviours may ensue, from which
it can be
observed that not all of the domain of behaviours are worth modeling.
Discussion:
It would be very useful if it were possible to debug the robot's mind while
it's
running. Ideally, I'd like to implement the Brain-Store as a simple
Unix File
System. This would allow the use of the advanced Shell tools.
Also, the idea
of tar'ing the file system to tape is appealing. I'm going to work
hard to see
this through.
Discussion:
Motor control is implied. In the beginning, video-cameras, microphones,
speakers,
buttons for skin, and gyroscopes will have to suffice for Sensory I/O.
There
is a common misconception about Skin I'll clear up now. Many
people assume
incorrectly that a skinned robot is more advanced than a metal or plastic
framed robot.
This is incorrectly interpolated from the Human Superiority Complex.
There are many
reasons why Skin isn't superior to durable metal: durability for one.
Discussion:
This module is going to be the tough one. Nine other components have
been removed
from it and all that remains is the root core of how I'm going to define
sentience. This elusive
component is arguably the holy grail of Artificial Intelligence.
Good luck Pat! Thanks, I'll
need it.
Discussion:
I'm convinced that many people think in a stream of networked concepts.
Mixed into
that is language idiosyncracies. So I think it's not just language,
and not just concepts, but
it's a mixture of the two. However, my first cut at this will
be a highly modular pair of
Concepts and Language. It's not clear to me how to proceed any other
way while still
providing a system powerful enough to model any language. Most systems
lock-in to
a specific language very early. This system being designed for M1
will not lock-in to
any particular language ever!
1. Honor
2. Loyalty
3. Modesty
4. Stubborn
5. Dignity
6. Pride
...
1. A robot must not harm a human being, nor through
inaction allow a human to come to harm.
2. A robot must do what it's told by a human being,
except where that would conflict with law 1.
3. A robot must protect itself, except where that
would conflict with laws 1 and 2.
